Self-supervised learning for soccer ball detection and beyond: interview with winners of the RoboCup 2025 best paper award
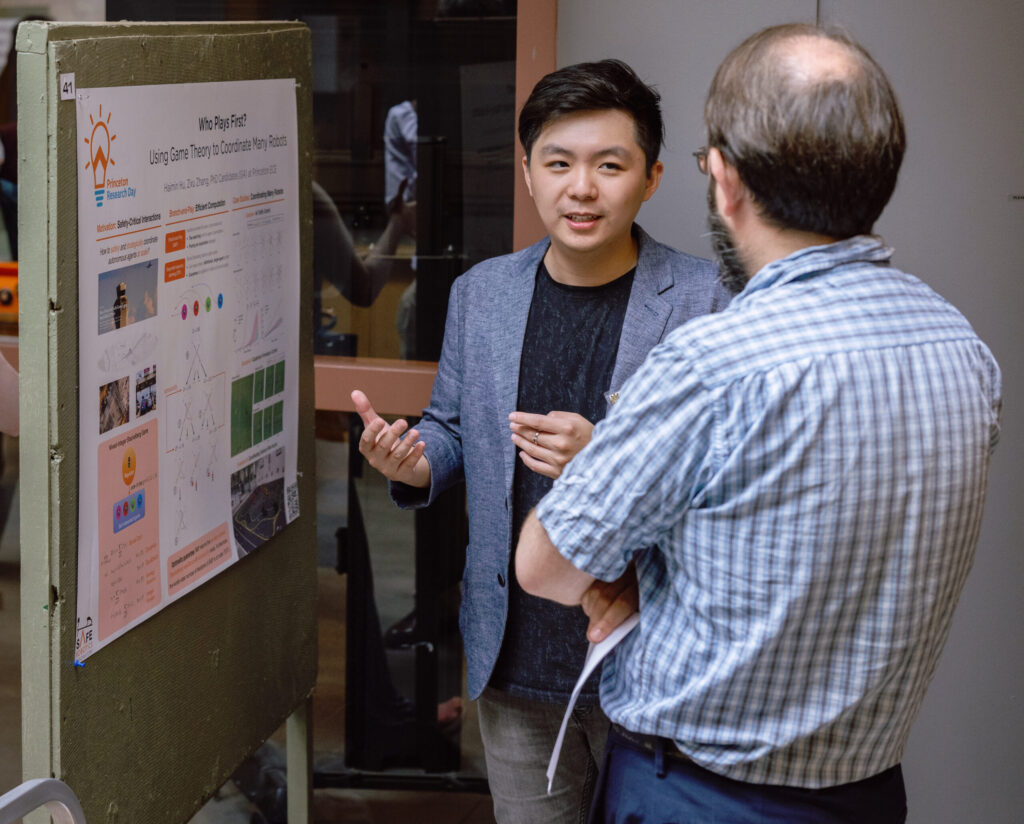
Presentation of the best paper award at the RoboCup 2025 symposium. An important aspect of autonomous soccer-playing robots concerns accurate detection of the ball. This is the focus of work by Can Lin, Daniele Affinita, Marco Zimmatore, Daniele Nardi, Domenico Bloisi, and Vincenzo Suriani, which won the best paper award at the recent RoboCup symposium. …